|
| void | _Collide (const AABBCollisionNode *node, udword clip_mask) |
| |
| void | _Collide (const AABBNoLeafNode *node, udword clip_mask) |
| |
| void | _Collide (const AABBQuantizedNode *node, udword clip_mask) |
| |
| void | _Collide (const AABBQuantizedNoLeafNode *node, udword clip_mask) |
| |
| void | _CollideNoPrimitiveTest (const AABBCollisionNode *node, udword clip_mask) |
| |
| void | _CollideNoPrimitiveTest (const AABBNoLeafNode *node, udword clip_mask) |
| |
| void | _CollideNoPrimitiveTest (const AABBQuantizedNode *node, udword clip_mask) |
| |
| void | _CollideNoPrimitiveTest (const AABBQuantizedNoLeafNode *node, udword clip_mask) |
| |
| inline_ bool | PlanesAABBOverlap (const Point ¢er, const Point &extents, udword &out_clip_mask, udword in_clip_mask) |
| |
| inline_ bool | PlanesTriOverlap (udword in_clip_mask) |
| |
| bool | InitQuery (PlanesCache &cache, const Plane *planes, udword nb_planes, const Matrix4x4 *worldm=null) |
| |
| void | _Dump (const AABBCollisionNode *node) |
| |
| void | _Dump (const AABBNoLeafNode *node) |
| |
| void | _Dump (const AABBQuantizedNode *node) |
| |
| void | _Dump (const AABBQuantizedNoLeafNode *node) |
| |
| | override (Collider) inline_ void InitQuery() |
| |
| inline_ BOOL | IsCacheValid (VolumeCache &cache) |
| |
| inline_ BOOL | Setup (const BaseModel *model) |
| |
| virtual inline_ void | InitQuery () |
| |
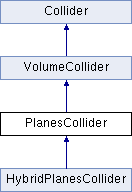
Contains a Planes-vs-tree collider.
- Author
- Pierre Terdiman
- Version
- 1.3
- Date
- January, 1st, 2002
Definition at line 30 of file OPC_PlanesCollider.h.
 Protected Attributes inherited from VolumeCollider
Protected Attributes inherited from VolumeCollider 1.8.4
1.8.4 
